CN
数字脉冲处理器。工作原理
数字脉冲处理器广泛应用于核仪器,是 Amptek 销售的大多数系统的基础。数字脉冲处理器执行的功能与模拟放大器/驱动器相同,但具有有效的性能优势,因此在需要同时具有最低噪声和最高计数率的应用中得到广泛采用。尽管数字脉冲处理器的功能与模拟驱动器相同,但实现方式不同,一些概念和术语也不同。本应用说明的目的是比较模拟和数字驱动器,帮助用户了解数字处理器,并解释其优缺点。
简化图表
图 1 和图 2 分别显示了模拟和数字放大器整形器的简化示意图。两者具有相同的检测器和电荷敏感前置放大器电路。在这两种情况下,前置放大器都会产生由幅度为毫伏的小脉冲(阶跃)组成的输出信号。在这两种情况下,前置放大器脉冲都是不同的,因此可以测量电压阶跃。积分器(也称为低通滤波器)可提高信噪比。在这两种情况下,输出脉冲都会被数字化,并且脉冲幅度的直方图会存储在内存中。这两个系统中的这些关键元素是相同的。
图 1. 简单模拟脉冲整形器示意图(带 CR-RC2 整形器)
")
图 2。“理想”数字脉冲处理器的简化图

在进一步详细研究数字脉冲处理器的操作之前,有必要熟悉核电子学中使用的基本术语;图 3 显示了单极脉冲的图示。
图 3. 典型单极脉冲形状的图示

脉冲持续时间是脉冲幅度不为零的时间。由于难以定义“零”幅度的确切值,因此通常将其定义为 FWHM(半峰全宽),即脉冲幅度大于或等于峰高一半的时间。
峰值高度- 从峰值到基线测量的脉冲高度。峰值时间- 将脉冲从基线整形到峰值所需的时间,与整形放大器的时间常数有关。
基线- 检测到事件时没有脉冲时的电压值。在核电子学中,脉冲高度是相对于基线测量的,基线不一定为零。
基线稳定器(BLS) 的任务是固定脉冲幅度的参考点,而不受电子元件的温度和时间漂移以及高计数率的影响(分离电容器上的动态偏移和运算放大器输入级的微加热)。
现在让我们考虑脉冲整形器的功能图。图 1 所示的模拟系统不如图 5(左)所示的脉冲整形器。微分器是一个 RC 高通滤波器。前端通过前置放大器,然后电压以时间常数 T diff呈指数衰减回原始值(基线) 。积分器是一个低通滤波器,响应时间为 T int。放大器整形器有很多种类型(半高斯、伪高斯、准三角等),它们使用不同的低通滤波器,不同放大器整形器的脉冲形状如图 4 所示。
图 4. 从不同的放大器整形器获得的脉冲形状说明。它们每个都有一个恒定的整形时间常数 1 µs,但积分器(低通滤波器)使用不同的传递函数
使用不同的传递函数")
一般性质:
RC-CR:实现起来非常简单,但是一般性能较差,即噪声、死区时间和稳定性。
- 双极性:脉冲下降可实现良好的基线稳定性,易于实现,但脉冲持续时间较长,因此死区时间值较大,噪声特性较差
- 半高斯和伪高斯:使用有源滤波器(复极点对)实现。与有源基线生成一起使用时,它们使用模拟元件即可提供良好的性能。
- 准三角:同样使用模拟元件中的有源滤波器实现。这非常接近“理想”传递函数,可实现最佳性能,但相对复杂。
- 梯形:使用数字处理实现。也非常接近理想情况,具有有限脉冲响应,并且在高计数率下性能增强。
使用混合复极对的更复杂的整形放大器可以快速返回基线,并且形状更对称。通常,脉冲形状近似于具有整形时间特性 t 的高斯。峰值时间约为 2.2t,持续时间相当于最大电压的一半,但尾部持续时间更长。基线发生器 (BLR) 产生基线,从中测量每个峰值。如果没有 BLR,微分器的交流电流将在高计数率下下降,因为直流输出必须为零。检测到模拟峰值,电路捕获峰值幅度,然后将其数字化。这个单个数字样本代表一个脉冲,因此 ADC 必须是线性的,但不一定非常快,因为它只数字化脉冲的一个样本。
在图 2 所示的“理想”数字系统中,前置放大器信号直接使用快速 ADC 进行数字化。这是离散微分电路的差分使用。信号被发送到低通滤波器,该滤波器对微分器输出进行积分。标有“过程”的两个块表示应用于输入信号并区分一个数字处理器与另一个数字处理器的算法。最常见的低通滤波器在输出端产生三角波形。梯形脉冲也很容易合成,更复杂的形状也是如此,例如“尖峰”。这些值已经数字化,因此检测到的数字峰值被发送到直方图存储器。直方图存储器的工作原理与传统的多通道幅度分析仪相同。当出现具有特定峰值的脉冲时,相应存储单元中的计数器会增加。结果是一个数组,每个单元都包含具有相应脉冲值的事件数。该能量谱是处理器的主要输出。积分器输出也可以馈送到 DAC,因此用户可以在示波器上查看脉冲,但系统不必生成模拟脉冲波形。脉冲整形器如图 5(右)所示。
图 5 左图:模拟脉冲整形器中的脉冲形状。它们对应于使用最接近三角形的复合极点的准三角整形器。右图:具有三角形和梯形形状的数字脉冲处理器中的脉冲形状。

真正的数字处理器
真正的数字处理器与“理想”处理器有几个关键区别。此外,由于动态范围的原因,直接数字化前置放大器输出是不切实际的。每个前置放大器输出都有一个步进,幅度为毫伏,沿着基线移动,基线可以是几伏,并且会随时间变化。步进必须以 10 到 14 位进行数字化,而且根本没有 ADC 能够将前置放大器输出动态范围的精度与必要的速度结合起来。因此,前置放大器输出被传递到模拟预滤波器,这允许精确地数字化步进。在数字化之前,有几种不同的方法来去除基线并放大步进。此外,微分器有各种实现方式,从低通滤波器或积分器到峰值检测逻辑。
结论:数字滤波的优点和缺点
数字处理器具有几个关键优势,下面列出并解释。数字脉冲处理器具有更好的性能(同时具有低噪音和高计数率)、更大的针对特定应用的定制灵活性、更好的稳定性和可重复性。
- 长期以来,研究人员一直在寻找用于核电子学的理想滤波器,以便在给定计数率下提供最佳信噪比。在实际的运算放大器电路中,理想的传递函数很难产生,但数字处理器最接近理想传递函数。
- 由于信号检测和数字化过程中没有死区时间,因此数字处理器的吞吐量比模拟系统更高。此外,由于数字处理器具有有限的脉冲响应,混叠和其他脉冲重叠效应会减少。数字处理器的性能优势在高计数率时尤其明显。
- 在模拟脉冲处理器中,大多数参数由电阻和电容决定。在模拟系统中拥有许多不同的配置参数是不切实际的。在数字系统中,可以拥有更多的整形时间常数、BLR 参数等,以便用户可以轻松地使系统适应任务的需要,从而提高运行效率。
- 由于模拟系统是建立在电阻和电容上的,因此其稳定性受这些元件的恒定性限制,其可重复性受其误差限制。在数字系统中,稳定性和可重复性要好得多,因为它们是由几个非常精确的源设置的,例如用于设置时间的石英振荡器。
数字处理器也有缺点。首先,它往往会耗散更多功率:具有适当速度和精度的 ADC 比许多模拟设计耗散更多功率。其次,该设计比模拟放大器整形器更复杂。
数字滤波的优点
有限脉冲响应:
在模拟整形器中,输入脉冲在微分器中产生指数尾部,需要无限长的时间才能返回零。这称为“无限脉冲响应”或 IIR。输出在有限时间后可忽略不计,但在很长时间内不为零,通常是脉冲标称“宽度”的许多倍。后续脉冲“停留”在先前脉冲的尾部。由于高通滤波器输出为直流,因此基线会以计数率偏移:在较大的跨度内,平均脉冲值很重要并且取决于持续时间,但尾部幅度较小。因此,会发生混叠,并且基线会偏移模拟微分器的 IIR 输出。混叠是两个或多个脉冲在时间上重叠的事件(图 6)。
图 6. 脉冲叠加示意图

该图显示了在随机时间间隔内发生的五起事件,因为核衰变是一个随机过程。单个脉冲用黑线突出显示,而蓝点表示测量到的重叠脉冲的总和。左侧的第一个脉冲在时间上是孤立的,其振幅在正确的高度测量。接下来的两个脉冲部分重叠,峰值之间有一个鞍点。将记录两个脉冲,第一个脉冲将具有正确的脉冲高度,但第二个脉冲的振幅将被错误测量。两个脉冲的重叠,如果峰值之间没有鞍点,则显示为单个脉冲(它们不可分辨),高度错误。如果两个重叠在时间上发生得足够近,则产生的振幅是各个脉冲的总和。
在数字整形器中,对脉冲的响应是矩形微分器响应:响应在 k 个脉冲后变为零。它具有“有限脉冲响应”(FIR),这意味着任何输入在有限的时间后都没有影响。这是与模拟整形器的主要区别。无论在 DPP 的输入端发生什么,都会在一定时间后导致输出端为零。这大大提高了 DPP 在高计数率下的效率,减少了混叠和基线偏移等。
平顶修复
在模拟整形器中,前置放大器提供正在处理的信号的快速上升和平坦顶部。微分器传递脉冲,但随后立即开始衰减。如果前沿缓慢上升,其整形时间将呈指数下降,脉冲不会达到全幅度,如图 7(左)所示。每个 X 射线探测器都有电荷收集时间,但脉冲整形时间足够长,以至于可以忽略电荷收集时间。在平面探测器中,例如 Amptek 6 mm2硅探测器,电子(空穴)需要 0.1(0.3)毫秒才能穿过 500 毫米的耗尽区。根据 X 射线穿透深度,前置放大器中产生的电流持续时间为 0.1 到 0.3 毫秒。如果使用 T flat < 0.3 毫秒的脉冲形状,则只能测量一小部分电荷。脉冲高度随上升时间的损失称为弹道亏损,当上升时间从一个脉冲变为下一个脉冲时会影响分辨率。
图 7. 模拟(左)和数字(右)整形器的输出微分器示意图
和数字(右)整形器的输出微分器示意图")
在此示例中,峰值时间为 4.8 µm sec,500 ns 的上升时间导致脉冲高度损失 0.5%。出现问题的原因是模拟“微分器”不接收实际的导数函数,因此不会形成平顶。数字微分器的优点是它实际上实现了数字导数的微分,因此获得了真正的平顶,如图 7(右)所示。前端和平顶具有与脉冲前置放大器相同的形状。因此,数字处理器可以避免弹道缺陷,并且平顶持续时间缩短几倍。
在硅漂移探测器(SDD)中,电荷收集时间也存在差异。物理机制与平面探测器不同,上升时间取决于电极结构的细节,电压偏移,但所有SSD都显示出不同的电荷收集时间。图8显示了使用Amptek SSD获得的波形。绿色波形显示前置放大器,上升时间为40至200 ns(缓慢上升的脉冲发生在电活性区域外缘附近)。
图 8. 示波器轨迹显示脉冲上升时间测量。绿色轨迹显示前置放大器输出,蓝色轨迹显示 ADC 输入,粉色轨迹显示 100 ns 峰值和 50 ns 平顶时间的慢通道。

图 9 显示了具有弹道赤字效应的光谱。这些图是使用低计数的 55Fe 源在没有外部准直的情况下获得的。左侧的图对应于 T峰值= 0.1 毫秒和 T平坦从 0.025 到 0.2 毫秒。较长的 T平坦导致较窄的峰值。右侧的图对应于 T峰值= 0.4 毫秒和相同范围的 T平坦。在 T峰值较大的情况下,即使较短的 T平坦时间也会导致弹道赤字减少。
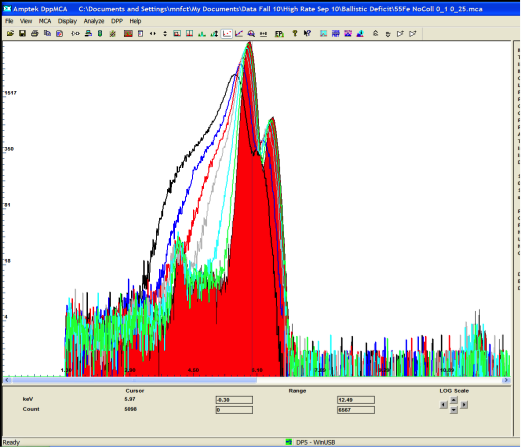
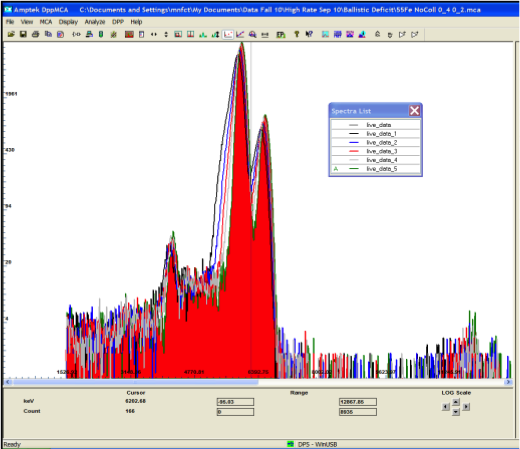
图 9. 采用 DP5 25mm2 Amptek SDD 时 Tpeak = 100 ns(左)和 400 ns(右)对应的光谱
怎样才能解决弹道不足的问题呢?
-
增加 T peak和 T flat。这将提高分辨率,但会降低最大计数率。对于 T peak > 2 ms,Amptek 建议 T flat > 0.2 ms,因为它对吞吐量没有太大影响。
-
增加偏置电压。这将使上升时间减少一半;
-
必须使用外部准直器。如果流量足够高,最好使用 Amptek mini-X;
-
原则上可以利用探测器的热阻来切断慢事件,这种方法被称为电子准直,因为它有效地减少了有效面积;
-
使用软件处理频谱上的弹道缺陷。
覆盖
R
图 10 显示了来自三个不同脉冲整形器的输出脉冲波形,所有波形均经过调整,以提供与半峰全宽测量时相同的脉冲宽度。红色轨迹显示最简单的整形器(模拟 RC-CR)的输出。蓝色轨迹显示来自高端模拟整形器(准三角整形放大器)的波形,使用 6 极低通滤波(三个复极对)。黑色轨迹来自数字梯形整形器。需要注意的最重要的一点是,尽管它们在 FWHM 处具有相同的脉冲宽度,但如果两个脉冲之间的间隔超过(t峰值+ t平坦),数字整形器将不会显示重叠。两个模拟整形器的指数尾部是 FWHM 的许多倍。在此期间重叠的脉冲将会重叠。
图 10. 显示在三个不同脉冲整形器中产生的脉冲的图表。所有脉冲的脉冲宽度基本相同,由 FWHM 指定。

数字整形器有两个优点。首先,数字整形器的混叠较少(即使具有相同的 FWHM)。其次,数字系统具有清晰的混叠时间:由于脉冲的对称性,在固定时间之后不会出现混叠。模拟整形器必须使用比峰值时间长得多的间隔的混叠抑制。由于脉冲整形,带宽(即死区时间)会减少,而在模拟系统中,死区时间较长。因此,与模拟整形器相比,数字系统具有混叠较少和高带宽。
堆积抑制 (PUR) 存在几个问题。首先,PUR 仅在 T fast < T peak时才起作用。其次,如果 T fast略小于 T peak,则不会发生堆积抑制。例如,当 T peak = 100 ns 和 T flat = 12 ns 时,实际死区时间为 ~ 140 ns。当 T fast = 50 ns 时,快速通道中一对脉冲之间的分辨率为 ~ 100 ns。在这种情况下,PUR 仅拒绝滞后 100 到 140 ns 之间的脉冲。第三,如果 T flat < T fast,“和峰”实际上不是峰值,而是具有相当复杂的形状。图 11 说明了这种情况。
图 11. 频谱显示了拒绝脉冲直方图重叠时平顶的持续时间。

这些值是在 T peak = 0.4 ms 时获得的。橙色频谱是在禁用混叠抑制的情况下获得的。灰色填充频谱显示启用了 PUR 且 T flat = 0.2 ms。其他频谱是在更短的 T flat值下获得的。弹道缺陷问题最好用 T flat > 100 ns 来解决,这也有助于在启用混叠抑制时减少伪影积累。Amptek 建议使用 T flat > 100 ns,T flat > 200 ns 且 T peak > 2 ms 左右,以帮助减少这些影响。蓝色频谱适用于 T flat = 75 ns。当平坦持续时间短于混叠抑制间隔时,脉冲可能会相互重叠,但不会产生组合峰值。绿色和红色频谱适用于 T flat = 25 和 50 ns。频谱分析软件通常设计为正确去除混叠峰值。要获得良好的整体峰值,您需要扩展平顶,这当然会降低吞吐量。
在示波图(图 12)上,脉冲形状等于两个随时间偏移的梯形之和。如果两个事件之间的间隔大于平顶的持续时间,则峰值的幅度与事件之间的延迟呈线性关系。如果延迟小于平顶的持续时间,则在图表上获得峰值之和。
图 12. 示波图显示脉冲重叠。粉色轨迹为 ADC 输入。浅蓝色轨迹为生成的输出(峰值时间为 2.4 毫秒)。蓝色轨迹为“ICR”信号,表示在快速通道中检测到脉冲。
。蓝色图")
信噪比
光谱放大器的主要任务是线性传输来自辐射探测器的信号的幅度值。在这种情况下,允许改变信号的形状。这意味着可以这样设计放大器的滤波电路,使信号的主要频谱通过它们,并且噪声频谱尽可能地受到限制。在这种情况下,我们得到了最佳的信噪比。最佳滤波器输出端的信号具有两个相交曲线的形状。这样的滤波器提供最佳的信噪比。实际滤波器通常具有其他特性,并且它们的信噪比更差。使用噪声超额率 K n.sh = ƞ∞/ ƞ 来比较滤波器很方便,显示最佳滤波器的 ƞ∞ 超过给定系统的 ƞ 的多少倍。不同类型脉冲的主要指标在表 1 中给出。这里 K n.sh。是在串行和并行噪声强度相同,输出信号幅度归一化为1的条件下计算的。
表 1. 一些整形电路的噪声过剩因子和脉冲形状

研究人员早就得出结论,对于固定的脉冲持续时间,当串行噪声占主导地位时,最佳信噪比由正三角形脉冲提供,而当并行噪声占主导地位时,最佳信噪比由“尖峰”脉冲提供。串行噪声是来自与探测器一起使用的组件的电子噪声。通常,噪声对应于前置放大器中的电压,主要来自前置放大器输入通道中的噪声。并行噪声是来自与探测器并联连接的组件的电子噪声。通常,它主要来自探测器中的热噪声和并联电阻。
模拟整形器近似于三角形,但数字处理器的传递函数更接近理想值。辐射检测系统的等效本底噪声由给定峰值时间 t peak 的串行和并行噪声发生器的噪声指数 As 和 Ap 来表征。噪声可以写成:
其中 L leak是通过探测器的漏电流,R p是与探测器的并联电阻,C in是总输入电容,g m是场效应晶体管的导纳,e peak是 1/f 噪声。关键点是噪声指标 Ap 和 As 取决于驱动放大器的细节。
下表显示了与图 9 中所示的三种常见调节放大器类似的噪声指数和 FWHM 脉冲宽度。如果峰值时间恒定,梯形和高斯具有相同的并行噪声指数,但数字具有较低的串行噪声指数,而高斯具有较长的持续时间,从而导致更多的混叠。在这种比较中必须小心,因为峰值时间并不是真正的关键参数。在图 9 中,所有脉冲都具有相同的峰值时间,但持续时间不同。脉冲宽度越长,混叠就会越多,即使峰值时间相同。还有一个问题,即找到一个最佳滤波器,该滤波器允许在光谱脉冲出现之前的有限时间间隔内以最小的噪声误差计算基线偏移,将其存储起来,并从信号、噪声和直流偏移的叠加中减去它。关键点是,具有真正梯形的数字脉冲处理器具有较低的噪声指数和比同类模拟整形器更窄的时域宽度。因此,它同时降低了电子噪声和混叠。
表 2. 三种常见整形放大器的噪声指标和脉冲宽度(FWHM)
")
多通道脉冲幅度分析仪(MCA)。带宽
模拟系统中有两种死区:一些脉冲可能会丢失(未被检测到),因为(a)脉冲在时间上重叠,或(b)检测到峰值但数字转换器正忙。大多数多通道幅度分析仪使用的 ADC 长度仅为微秒,但即使模拟脉冲在时间上不重叠,由于数字转换器的死区,计数也会丢失。在数字处理器中,峰值采样没有死区。整个脉冲波形已经以高速数字化,例如 20 MHz。更新直方图内存需要几个时钟周期,但这是可以忽略不计的。因此,数字系统没有与峰值采样相关的死区。它有与脉冲宽度相关的死区,如上所述。
线性
在模拟系统中,ADC 的非线性对系统的非线性有很大影响。由于多通道脉冲幅度分析仪进行单峰高度测量,因此 ADC 步长大小的任何非线性都会导致非线性脉冲高度测量。一种常见的 ADC 消除非线性的方法是向脉冲添加随机数,将其数字化,然后减去随机数。结果是几个 ADC 代码,用于测量单个脉冲高度的电压。在数字系统中,每个脉冲高度是许多不同 ADC 测量的总和,本质上是使用许多不同的 ADC 代码。这使数字系统的线性度大大提高。
可配置性。
在模拟脉冲处理器中,大多数参数由电阻和电容决定。例如,在伪高斯整形器中,整形时间由一组十四个电阻和电容决定。具有四个整形时间常数的模拟放大器整形器将需要所有这些元件的四组不同组件。在模拟系统中拥有许多不同的配置参数是不切实际的。
在数字系统中,整形时间被设置为数字延迟周期数,并存储在累加器中。在时间整形器和20MHz时钟之间切换很容易,步长为50ns,可以进行非常精细的调整。这样的处理选项在模拟电路中是不可能实现的。例如,一些数字处理器以脉冲为单位调整峰值时间:如果两个脉冲之间的间隔很小,则使用较短的峰值时间,这会增加一点噪声,但可以消除混叠和计数损失。在数字系统中,可以轻松获得更多的参数和配置选项。这些参数不仅包括整形时间,还包括基线恢复参数、混叠抑制参数等。数字系统具有更多的配置参数,因此用户可以轻松地使系统适应手头问题的需要,从而提高工作效率。
稳定性和可靠性。
由于模拟系统基于电阻器和电容器,因此其稳定性受到这些元件的稳定性及其误差的可重复性的限制。电阻器和电容器的温度系数会导致温度梯度的增长和形成。电阻器和电容器之间的误差会导致从一种配置移动到另一种配置时名义上相同的脉冲形状之间出现差异。增益精度通常用电位计设置,很难恢复到以前的设置,也很难微调两个系统以使其相互匹配。
在数字系统中,稳定性和可重复性取决于一些非常精确的来源,例如用于设置时间的石英振荡器。在这种情况下,温度漂移要低得多。可重复性要好得多。在数字系统中,增益以数字方式设置,您可以精确地返回到先前的参数。此外,与许多具有焊接连接的分立元件的故障率相比,FPGA 中的故障率非常低。
结论
数字处理器与模拟整形器相比具有固有的性能优势。它具有有限的脉冲响应,减少了混叠和基线偏移,提供了更好的噪声过滤(对于相同的脉冲宽度),减少了弹道缺陷并提高了线性度,具有更好的可配置性、稳定性和可靠性。
它的主要缺点是快速 ADC 的功耗明显高于模拟驱动器中使用的运算放大器和慢速 ADC。当需要最佳性能、最低噪声和最高计数率操作时,数字处理器是最佳解决方案。





